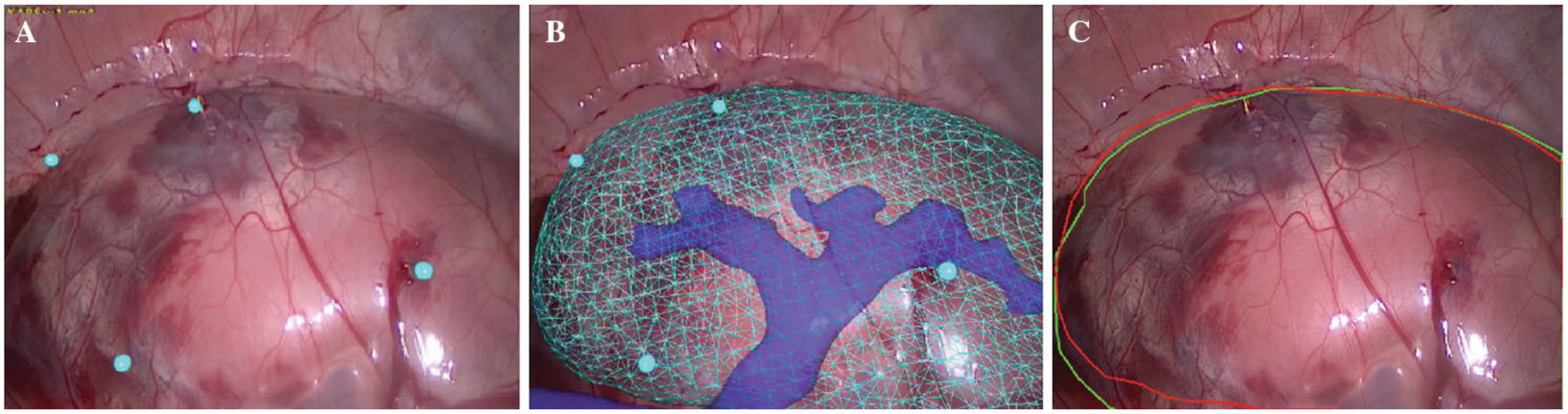
Kidney Augmented Reality Surgery project focused on the capability of AR to achieve this fusion in real-time and to compute the tumor position with high accuracy (less than 2mm). To achieve this accuracy, three studies are necessary:
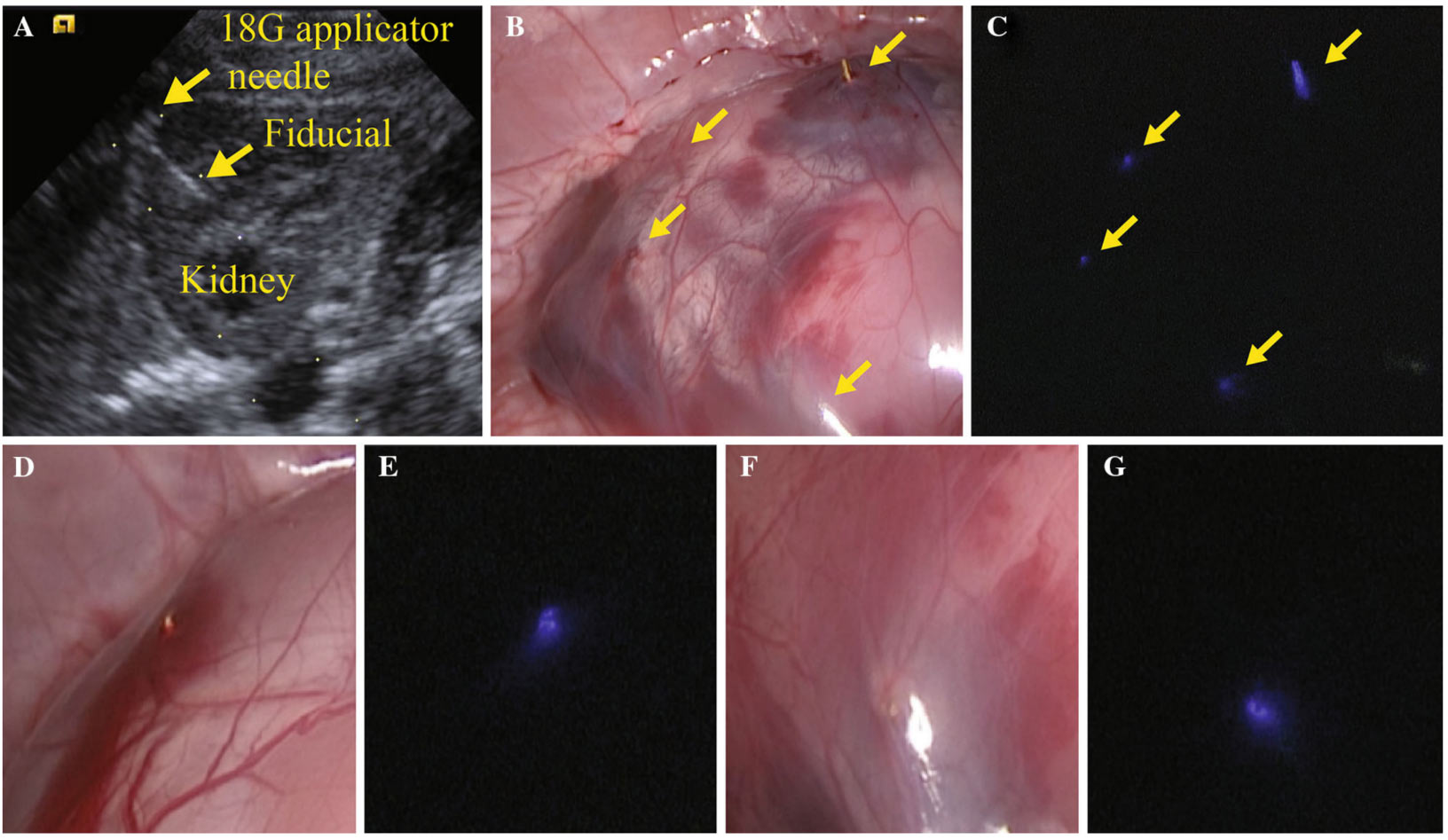
1. Identification of salient markers in both the pre-operative 3D model and intra-operative images
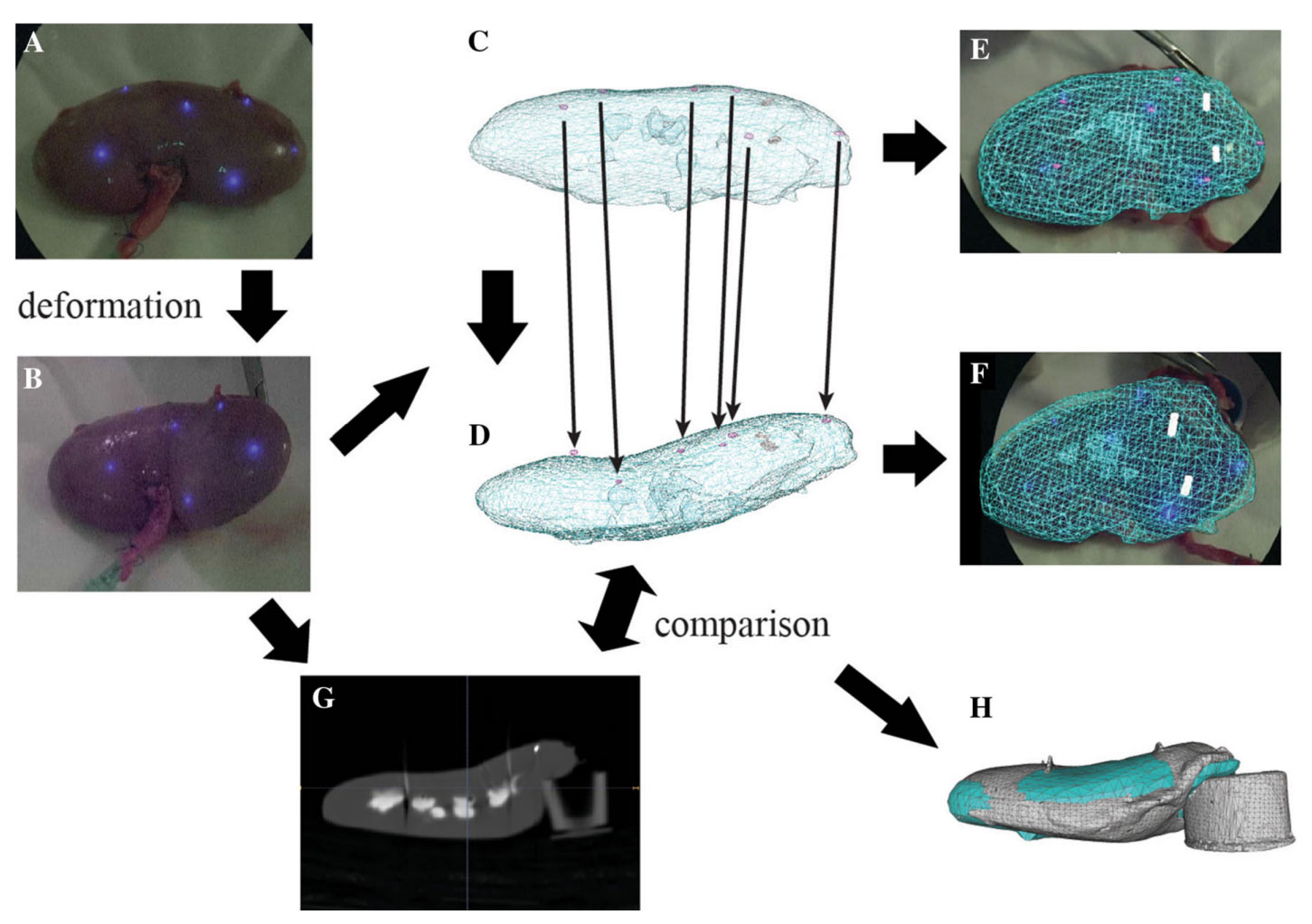
Motion estimation of the kidney surface using advanced computer vision algorithms. This component will particularly relies on the tracking of the previously cited markers, to ensure a long-term and robust detection and tracking.
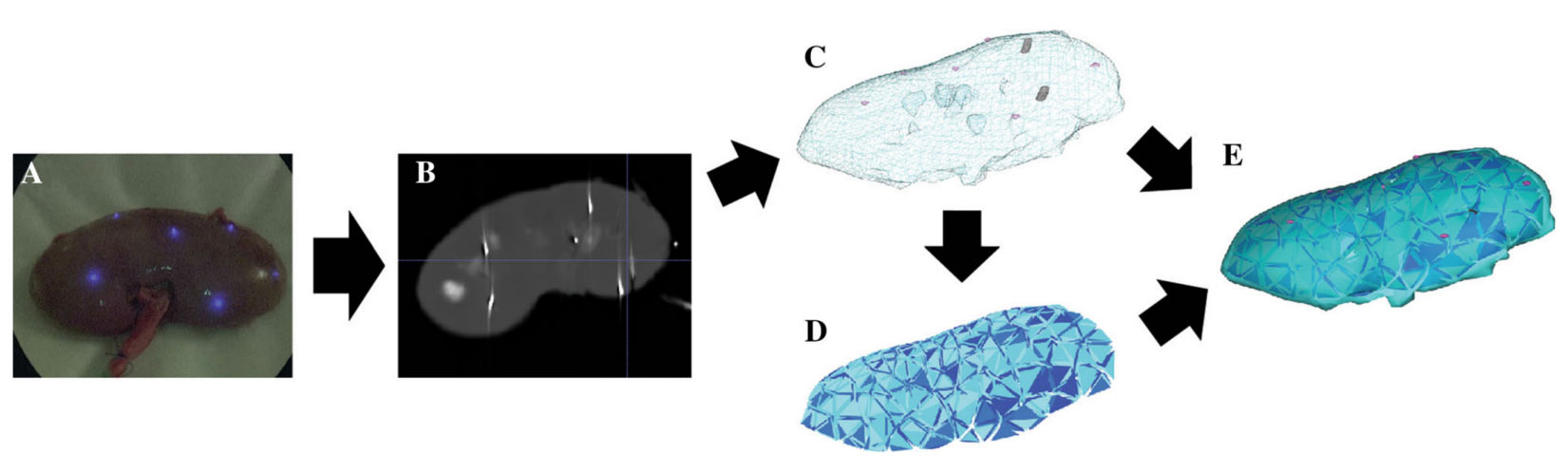
2. Modeling and real-time simulation of kidney tissue, that account for the vascular network and tumors: Despite the fact that the kidney is considered as a quasi-rigid organ, the need of a volume representation to visualize the tumors involve the complete bio-mechanical modeling of kidneys in order to faithfully translate the kidney behavior.
3. In addition, since we only relies on a surface information from laparoscopic images, the bio-mechanical model will play an important role to propagate the kidney surface motion to internal structures such as tumors.