
Research
Our Research Activities
Interactive Computational Models
Our research aims at developing more advanced simulations, with stronger mathematical and biomechanical foundations, and their adaptation to a specific patient. We want, in particular, to develop more stable numerical methods that would, at the same time, be suited for the generation of digital twins of organs. Given that our main field of application is compute-guided surgery, we investigate numerical techniques to achieve for accelerating physic-based simulations to achieve real-time computation; we also study the numerical aspect of contact problems.
Scientific Topics
Adaptive Immersed Boundary FEM Methods
Hybrid Numerical Methods for Real-Time Computation
Improved Tool-Tissue Interaction Models
Scientific Machine Learning
Main Applications
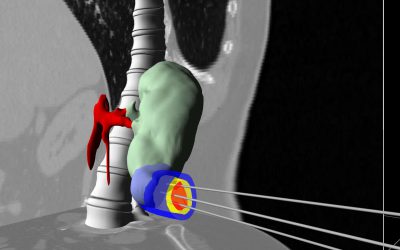
Liver Ablation Simulation
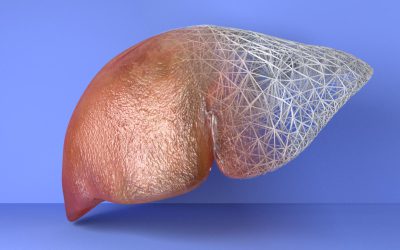
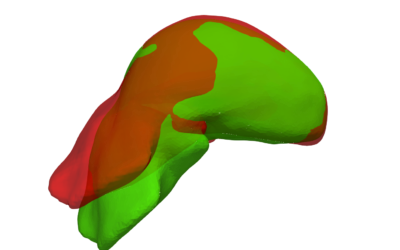
Digital Twins
This project aims at developing accurate, real-time, patient-specific biomechanical models for organs. These deformable models will be based on...
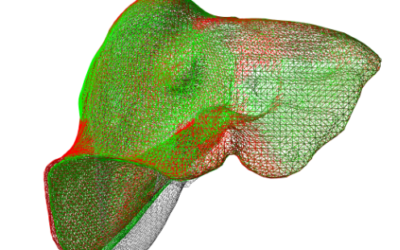
ɸ-FEM
For several of years, our research has focused on finite element methods that fall under the class of unfitted (also known as immersed boundary)...
Physic-based Neural Networks
A number of techniques have been put forth with the aim of accelerating the simulations of non-linear solids. These techniques remain essentially...
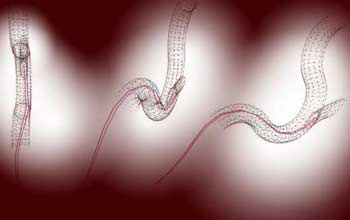
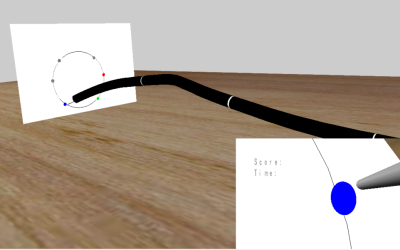
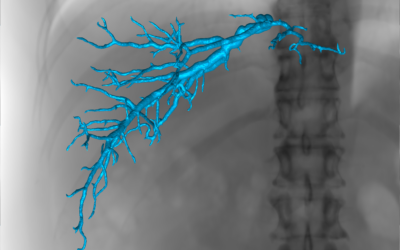
Catheter Navigation
Endovascular surgery is a medical spcialty of minimally invasive procedures that treats pathologies affecting blood vessels reliying on the use of...
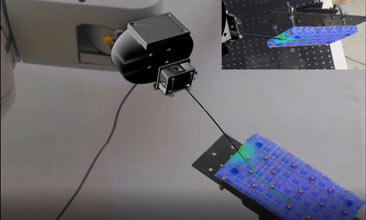
Needle Insertion
Needle insertion is a key procedure in minimally invasive surgery including percutaneous (through the skin) therapies. It is seemingly very simple:...
Flexible Endoscopy
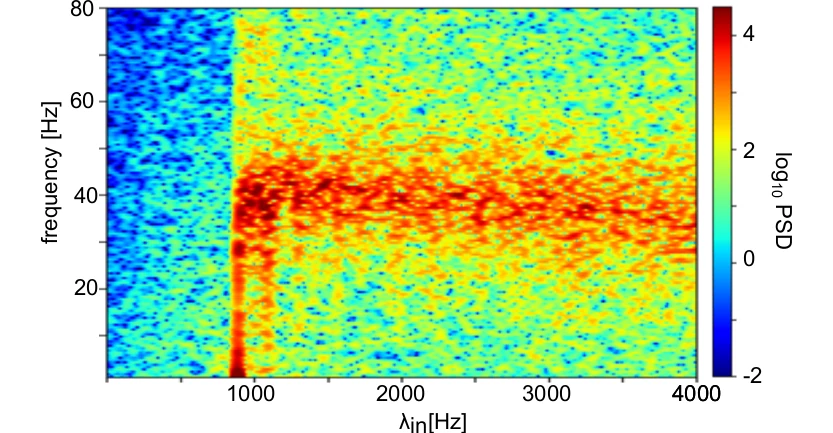
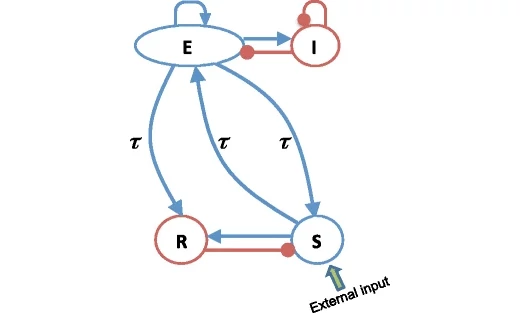
Stochastic Neuronal Networks
Biological neuronal networks exhibit a strongly random structure and receives strongly fluctuating inputs. We investigate the impact of additive...
Optimization & Control for Computer-Assisted Interventions
Our second research axis is derived from our application context and essentially consists of developing optimization and control methods for computer-assisted interventions. At the core of our activity is the hypothesis that data-driven simulation has the potential to bridge the gap between medical data (most often images) and clinical routine by updating pre-operative knowledge with the information available at the time of the procedure.
Scientific Topics
Data Assimilation using Non-Linear Bayesian filters
Control in Medical Robotics
Optimal Control and Differentiable Simulation
Deep Learning and Optimization for Elastic Registration
Main Applications
Augmented Reality for Surgery
Despite the improvements of surgical techniques and tools, some surgical interventions remain very challenging for surgeons, especially for...
Robotic Control
Non-Rigid Registration
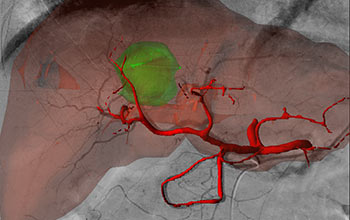
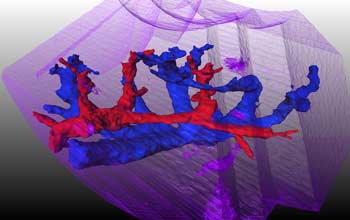
Augmented Fluoroscopy
We propose a deep learning approach to align preoperative 3D CT scans with intraoperative 2D X-ray images by predicting anatomical deformations....
Augmented Ultrasound
Ultrasound imaging is ideal for hepatic surgery guidance, but is has the disadvantage of limited field of view besides poor image quality. Fusing...
Neurostimulation
According to the World Health Organization, the burden of mental disorders continues to grow with significant impact on health, major social and...
Open Source Software
Members of the team consider essential to disseminate our research results – and the algorithms to produce them – in an open manner. The objective is to also develop a framework that could be used internally as a mean to integrate our various contributions and facilitate validation and technology transfer. Many of our research results have been released to the community as open source code, either through improvements of SOFA or as plugins of the framework.

SOFA Framework
SOFA is an efficient and accurate simulation framework written in C++, developed by our team and researchers from a couple of other Inria teams. It...
Caribou
The Caribou project is aimed at multi-physics computation. It brings a plugin that complements SOFA multi-physics framework. It also provides...

DeepPhysX
The purpose of DeepPhysX framework is to provide an interface between deep learning algorithms and numerical simulations. It is a full Python...
Optimus
The Optimus plugin was created to provide a testing environment for data-driven physics-based modeling (typically based on the finite element...