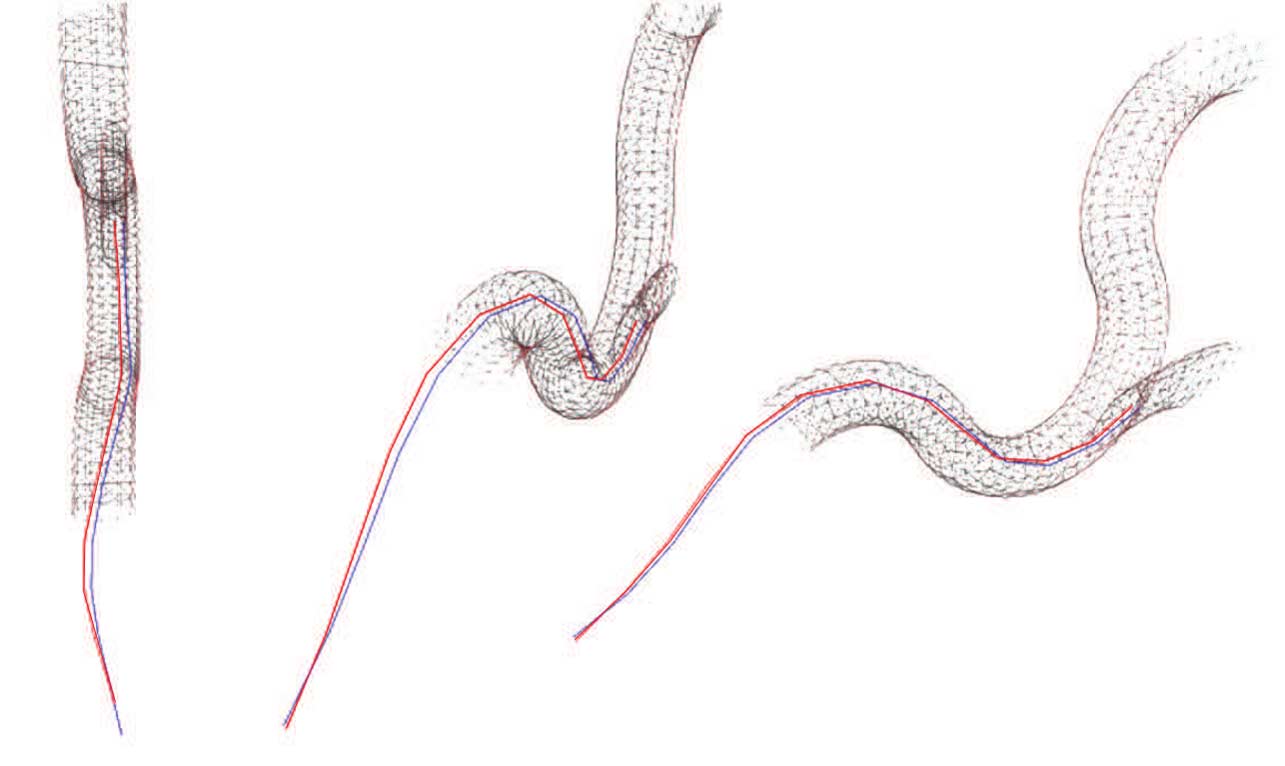
Endovascular surgery is a medical spcialty of minimally invasive procedures that treats pathologies affecting blood vessels reliying on the use of catheters, guide-wires and other endovascular devices. These clinical interventions are generally complex and rely on mechanical interactions between a device and the anatomy.
Our activity on this topic rely on constraint modeling and simulation of contacts with friction. The complexity of the problem often leads to unstable numerical approaches, inaccuracy of the solution and very slow computation times. We propose several techniques that makes it possible to obtain real-time simulations in the presence of hundreds of contacts.