Needle insertion is a key procedure in minimally invasive surgery including percutaneous (through the skin) therapies.
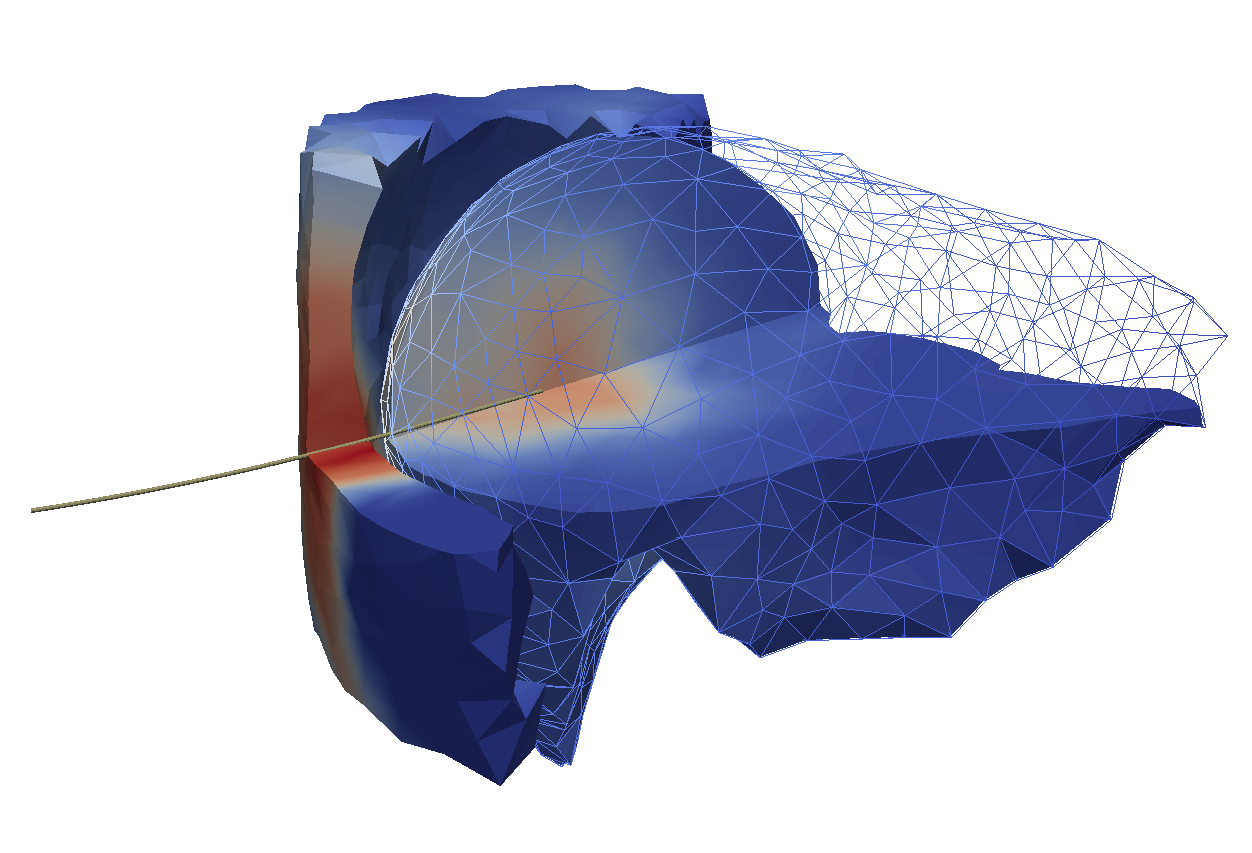
It is seemingly very simple: a surgeon aims the needle at the anatomical target (with the target position determined from high-quality medical image acquired before surgery). During the insertion, the tissue deforms and the target moves due to the interactions between the needle and tissue.
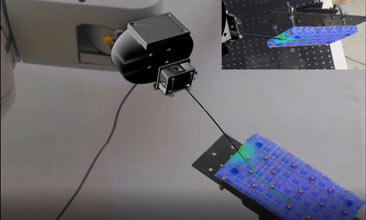
Although, surgeon’s hand can be replaced with a robotic manipulator to ensure that the planned needle trajectory is precisely followed, neither the robot nor the surgeon can predict the deforming tissue and moving target. Consequently, the risk of missing the target is substantial.
The goal of this project is to use the finite element bio-mechanical models to predict the tissue deformations and surgical target movements, then to ingrate this prediction with surgical robot control, in order to improve the insertion accuracy and to decrease the risk of adverse effects.